





Si echamos un vistazo a nuestro alrededor, podemos comprobar como el campo de la robótica está atravesando una gran transformación, la tecnología evoluciona a pasos agigantados y de su mano la automatización de los objetos más cotidianos. Existen lenguajes de programación que facilitan esta tarea, como es Arduino, que permite infinitas aplicaciones, ya sea en aparatos más complejos como es en el caso de la robótica o domótica, hasta funcionalidades sencillas como puede ser la automatización de puertas de garaje o jardinería hasta el uso de impresoras 3D.
Es cierto que hemos oído mucho hablar de Arduino, pero realmente sabemos qué es o nuestra definición se centra simplemente en un lenguaje de programación… Si es así, en este post vamos a profundizar sobre este software y explicaremos el uso de actuadores con Arduino. ¡No te lo pierdas!
Quizás te interese: Actuadores eléctricos en robótica: algunas sorprendentes innovaciones
Como hemos mencionado anteriormente, Arduino es un lenguaje de programación y una placa open source, es decir, un software y hardware libre, sin derechos de copyright ni de ningún tipo.
Sus aplicaciones son infinitas y su límite reside en la imaginación de las personas. A pesar de que hasta el momento se utilizaba de una forma más didáctica, para el prototipado o para el Do it Yourself, actualmente existe una creciente tendencia en utilizarlo en productos de venta al público debido a su sencillez, modularidad y a la gran cantidad de librerías y códigos gratuitos que existen en internet.

Arduino tiene gran variedad de placas, desde la más pequeña (nano) hasta la más potente (MEGA), pero la que más ventas tiene es el modelo UNO, ya que es la placa más robusta e ideal para comenzar a usar la electrónica y la codificación.
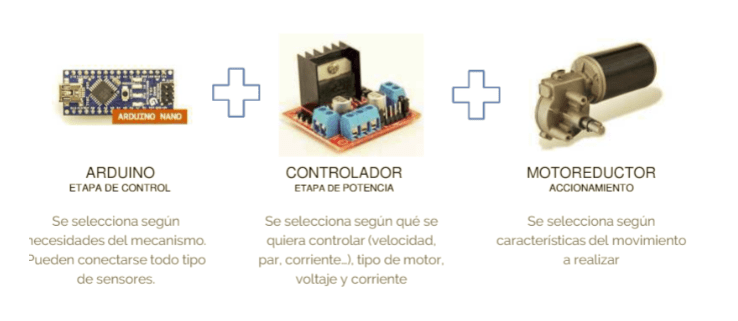
Entre las incorporaciones de los actuadores a arduino, los dispositivos son salidas que se utilizan para generar una acción, generalmente un motor. En arduino el más famoso suele ser el servo-motor, pero es uno de los muchos que pueden utilizarse. La placa arduino puede suministrar una corriente limitada, es por ello que los motorreductores se conectan a través de un circuito de potencia o controlador de motor. Estos motores suelen controlarse por PWM (Pulse Width Module), pudiendo seleccionar velocidad y sentido de giro en la salida.
Reductores idóneos para conectar con Arduino
A la hora de utilizar motorreductores conectados a este software, comúnmente se utilizan motores corriente continua, ya que son más fáciles de controlar. Los motores AC necesitan de un variador de velocidad, los cuales, dependiendo del modelo, podrían llegar a controlarse mediante Arduino, pero es mucho más complejo, ya que suelen ser controlados por PLCs industriales.
Por ello, a la hora de seleccionar un actuador para arduino nos tenemos que fijar principalmente en el controlador (etapa de potencia), ya que debe elegirse la tensión y corriente máxima del mismo.
Estos valores nos los dará el actuador/ motor que requiere nuestro sistema, generalmente debe comprobarse tensión de alimentación, velocidad y par ofrecido. En las fichas técnicas el fabricante indica la corriente que consume en vacío, máximo rendimiento y bloqueo. Una de las mejores opciones para obtener un buen balance entre consumo, par y velocidad, es a través de motorreductores (acoplando al motor una caja reductora).
¿Te gustaría seguir profundizando? Entonces no te pierdas: Cómo seleccionar el mejor motor eléctrico en pequeños accionamientos
Elementos a tener en cuenta para elegir un motor o actuador
Además de lo comentado anteriormente, a la hora de elegir un actuador para un proyecto con Arduino se deben contemplar distintos factores como:
Características mecánicas:
- Velocidad: La relación entre el desplazamiento que realiza el actuador y el tiempo.
Velocidad = Posición/ Tiempo
- Fuerza o par: La fuerza ejercida por un actuador aplicada a una cierta masa se emplea en modificar su velocidad.
Fuerza= Masa · Aceleración
Aceleración= Velocidad/ Tiempo
Pero hay que tener en cuenta, que existen fuerzas de rozamiento, por lo que a efectos prácticos un actuador no podrá mover cualquier masa. Por ello, en el caso de actuadores rotativos el equivalente de la fuerza es el par:
Par= Inercia · Aceleración angular
- Potencia mecánica: Cantidad de energía por unidad de tiempo que el actuador es capaz de entregar a la carga:
Pmecánica= Fuerza · Velocidad
En el caso de los actuadores rotativos:
Pmecánica= Fuerza · Velocidad angular
- Carga máxima que puede soportar el actuador
- Precisión
Características eléctricas:
- Potencia eléctrica: Energía por unidad de tiempo absorbida por el actuador de la funete de alimentación, medida en Watios (W):
Pelectrica= V· I
- Tensión nominal: Tensión a la que debemos alimentar el motor para un funcionamiento correcto. Los valores frecuentes para motores y actuadores son 6V, 12V y 24V.
- Corriente nominal: Intensidad de corriente que debemos suministrar al motor para un funcionamiento correcto.
Otros factores:
- Forma y dimensiones
- Peso del actuador y de los componentes adicionales
- Grado de protección IP
- Rango de temperatura
- Vida útil
- Fijaciones y soportes
En el momento de seleccionar un actuador tenemos que tener en cuenta que no solo existe una única solución, sino que deberemos elegir aquel que mejor se adecue a nuestras necesidades. Para ello lo necesario es conocer tanto las características, como funcionamiento, ventajas y desventajas de nuestro actuador.
Si tienes un nuevo proyecto con Arduino pero todavía no sabes cómo abordarlo, desde CLR podemos aconsejarte sobre cuál es el motorreductor más adecuado para ti, nosotros entendemos tus necesidades, las traducimos en ideas y fabricamos tu producto. ¿En qué podemos ayudarte?


Arduino is one of the best,Ardunio are used in Most of the technology