
If we take a look around us, we can see how the field of robotics He's going through a big transformation, the Technology is evolving by leaps and bounds And from his hand the automation of the most everyday objects. There are programming languages that facilitate this task, such as Arduino, which allows infinite applications, whether in more complex devices such as robotics or home automation, up to simple functionalities such as automation from garage or garden doors to the use of 3D printersIt's true that we've heard a lot about Arduino, but we really know what it is or our definition simply focuses on a programming language... If so, in this post we are going to dive deeper into this software and explain the use of actuators with Arduino. Don't miss it!
You might be interested in: Electric actuators in robotics: some surprising innovations
As we mentioned before, Arduino It's a programming language and an open source board, that is, free software and hardware, without copyright not of any kind.SUS applications are endless and its limit lies in the imagination of people. Despite the fact that until now it was used in a more didactic way, for prototyping or for Do it Yourself, there is currently a Rising trend in using it in products for sale to the public due to its simplicity, modularity and the large number of free libraries and codes that exist on the internet.

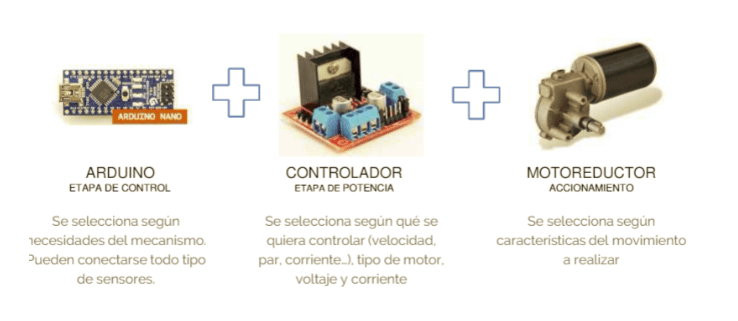
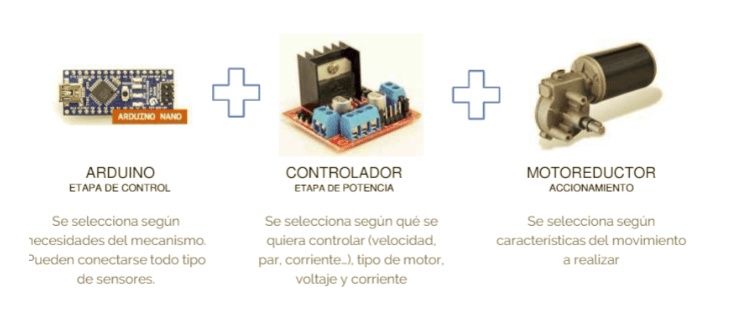
Arduino hath wide variety of plates, from the most small (nano) Until the most powerful (MEGA), but the one with the most sales is the UNO model, since it is the most Robust and ideal for starting to use electronics and coding. Among the Incorporation of actuators to Arduino, devices are outputs that are used to generate an action, usually a motor. In Arduino, the most famous is usually the servo motor, but it's one of many that can be used. The Arduino board can supply a limited current, which is why the gearmotors are connected through a power circuit or motor controller. These motors are usually controlled by PWM (Press Width Module), being able to select speed and direction of rotation at the exit.
Ideal reducers to connect with Arduino
When using gearmotors connected to this software, they are commonly used DC motors, since they are more easy to control. The AC motors they need a variable speed drive, which, depending on the model, could be controlled by Arduino, but it is much more complex, since they are usually controlled by Industrial PLCs.Therefore, when it comes to Select an actuator for Arduino we have to focus mainly on the handler (power stage), since you must choose the maximum voltage and current of the same. These values will be given to us by the actuator/ motor What our system requires, should generally be checked supply voltage, speed and torque offered. In the technical data sheets, the manufacturer indicates the current consumed under vacuum, maximum performance and locking. One of the best options to obtain a good balance between consumption, torque and speed is through gearmotors (attaching a gearbox to the motor).
Would you like to continue digging deeper? Then don't miss: How to select the best electric motor in small drives
Things to consider when choosing a motor or actuator
In addition to what was mentioned above, when choosing an actuator for an Arduino project, consideration should be given to different factors like:
Mechanical characteristics:
- Velocidad: The relationship between the movement made by the actuator and time.
Speed = Position/ Time
- Force or par: The force exerted by an actuator applied to a certain mass is used to modify its speed.
Force= Mass · Acceleration
Acceleration= Speed/ Time
But we must bear in mind, that Are there friction forces, so for practical purposes orAn actuator will not be able to move any mass. Therefore, in the case of rotary actuators The equivalent of force is The pair:
Par = Inertia · Angular acceleration
- Mechanical power: Amount of energy per unit of time that the actuator is capable of delivering to the load:
Pmechanics= Strength · Speed
In the case of rotary actuators:
Pmechanics= Force · Angular velocity
- Maximum load it can withstand The actuator
- Accuracy
Electrical characteristics:
- Electrical power: Energy per unit of time absorbed by the power supply actuator, measured in Watts (W):
Electric = V · I
- Nominal voltage: Voltage at which we must power the motor for proper operation. Common values for motors and actuators are 6V, 12V and 24V.
- Nominal current: Current intensity that we must supply to the motor for proper operation.
Other factors:
- Shape and dimensions
- Weight of the actuator and of the additional components
- IP degree of protection
- Temperature range
- Lifespan
- Fixings and supports
When selecting an actuator, we must take into account that Not only is there a single solution, but we must choose the one that best suits our needs. To do this, it is necessary to know both the characteristics, as well as operation, advantages and disadvantages of our actuator. If you have a new project with Arduino but you still don't know how to approach it, from CLR we can advise you on What is the most suitable gearmotor for you, we understand your needs, translate them into ideas and manufacture your product. How can we help you?
We offer customized, tailor-made solutions. Configure with us the perfect gearmotor for your project.
Do you have a project in mind?
We can manufacture your tailor-made solution, we accompany you at every stage of the project to offer the solution that best suits your application.
Do you have a project in mind?
We can manufacture your tailor-made solution, we accompany you at every stage of the project to offer the solution that best suits your application.

Joaquín Vilanova Avenue, 30
03440 Ibi, Alicante, Spain

+34 965553607

